□ 개요
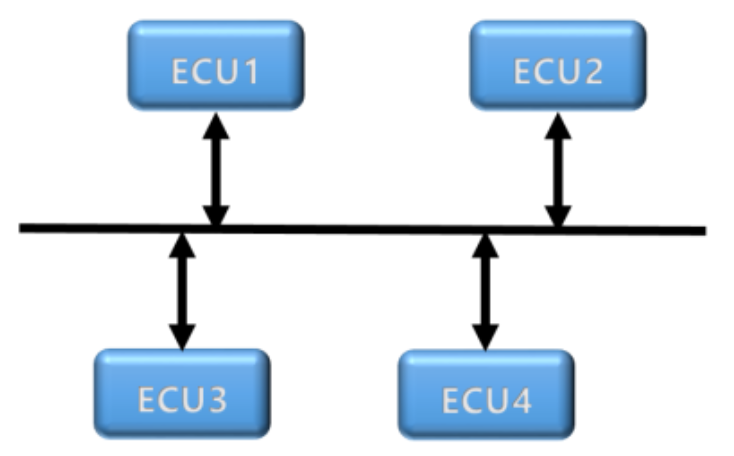
○ CAN(Controller Area Network) 통신은 여러 개의 ECU(Electronic Control Unit)를 병렬로 연결하여 데이터를 주고받는 통신방법이다.
○ CAN 버스를 통해서 통신선 상에 데이터를 띄워놓고 필요한 데이터에 접근(Access)한다.
□ 특징
① 다중(Multi Master) 통신 방식 : 통신 버스를 여러 노드(node)들이 공유하면서 언제든지 버스을 사용할 수 있다.
② 간단한 구조 : CAN_High, CAN_Low 두 개의 신호로 통신하므로 단 2개의 선만이 필요하므로 많은 모듈이 추가되더라도 추가되는 선의 양이 적다.
③ 잡음에 매우 감함 : CAN BUS는 Twist Pair 2선으로 되어 있어 전기적 잡음(noise)에 강해 메시지를 보호할 수 있다.
④ ID 값을 이용한 우선순위 : 고유한 ID 값으로 메시지 내용과 우선순위가 결정되므로 시스템 제어 속도와 안전성을 향상할 수 있다.
⑤ 고속 및 원거리 통신 : 통신속도가 500k~1M bps로 고속통신을 제공하며, 최대 1km까지 원거리 통신이 가능하다.
⑥ PLUG & PLAY 기능 : CAN 제어기(Controller)를 버스에 간편하게 연결하고 끊을 수 있어 여러 장치를 추가하고 제거하기 쉽다.
□ 계층구성
○ CAN 통신은 프레임이라고 하는 패킷(packet)으로 데이터를 전송하며, 프레임이란 하나의 메시지를 이루는 필드 또는 bit들의 집합을 말한다. CAN 프레임은 다음과 같은 분할구역(section)으로 구성되어 있다.
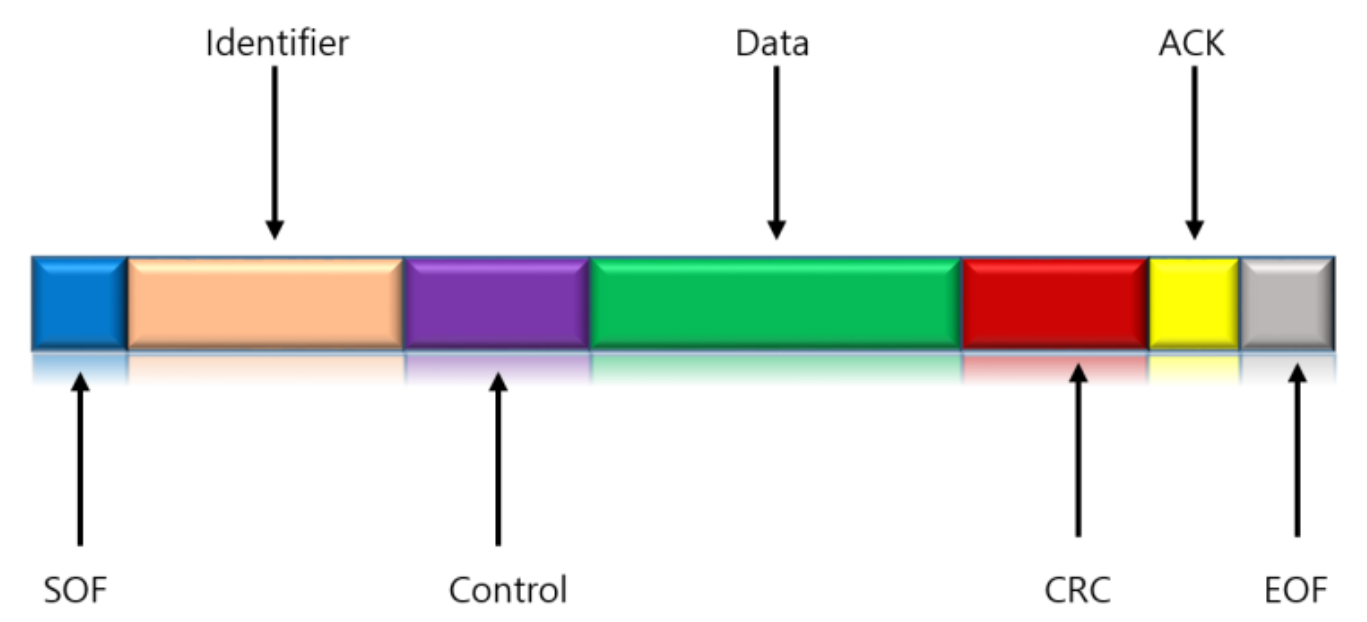
① SOF(Start Of Frame) 비트 : 메시지의 시작을 의미하는 주요한 버스의 노드(node)를 동기화하기 위해 사용된다.
② Identifier(ID) : 메시지의 내용을 식별하고 메시지의 우선순위를 부여한다. ID의 길이에 따라 11비트 식별자를 가지는 표준 CAN과 29비트 식별자를 가지는 확장 CAN으로 구분된다.
③ Control : 데이터의 길이(DLC)를 의미한다.
④ Data : 전달하고자 하는 내용을 의미한다.
⑤ CRC : 송신 오류 및 오류 검출에 시용된다.
⑥ ACK 비트(Bit) : 메시지를 정확하게 수신했다면 ACK(Acknowledgement) 비트를 전송하여 오류 없는 메시지가 전송되었다는 것을 의미한다.
⑦ EOF(End of Frame) 비트 : 프레임의 끝을 나타내고 종료를 의미한다.
'상식' 카테고리의 다른 글
| 궤도회로 열차 단락저항 및 단락감도 (3) | 2023.12.30 |
|---|---|
| 국토교통부 “철도안전 강화대책” 4가지 (4) | 2023.12.27 |
| 슬랙(Slack)의 개념과 산출식 (53) | 2023.12.26 |
| 노면전차 건설 및 운전 등에 관한 규칙(국토교통부령 제1201호, 2023. 3. 31.)에서 정하는 신호기 설치 기준 및 노면전차 신호기 (9) | 2023.12.21 |
| 임대보증금 보증 면제대상 완벽정리 (3) | 2021.09.25 |


